.png)

THREE PROBLEMS:
- How to make a rocket modular?
- How to solve earth relative tracking?
- Can it look cool?
FOLLOW ALONG WITH OUR DEVLOG SERIES
This series captures our development process of the Insight C1 rocket! We share the progress and lessons we have learned along the way!



CARBON FIBER FRAME
Supported by GoodWinds Composites
One of the issues Luke and I had with the common cardboard rocket is the inaccessibility of components and the difficulty to move and re-configure the rocket. To solve this we simply removed the cardboard exoskeleton. Fluid simulations indicate that we do not need an airframe for most of our planned flights but the possibility to add a skin to the rocket is still there for when we eventually do higher and faster flights! This design makes Insight the perfect testbed as 3 dimensions standardize all our components.
NEW CODE AND CONTROL LAW
Good C++ and State Space
Our new code base consists of over 15 different custom libraries we created. Varying from efficient orientation resolution using quaternions to making LEDs blink and buzzers beep! The new code is significantly more efficient and uses more best practices. The rocket features State-Space control that allows the rocket to control for more than one input and more than one output, this will be particularly useful with the implementation of our cameras.
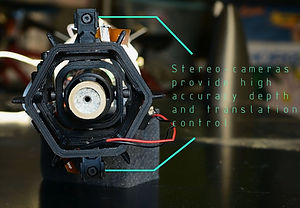
CAMERAS?!
It's like Autopilot for a rocket
Hailing inspiration from the automotive industry and their autonomous driving push, Insight has two cameras at the bottom (get it... in SIGHT) these two cameras will be used to solve the big problem-- the earth-relative one. The two cameras are running a modified SLAM(Simultaneous Localization And Mapping) algorithm that will allow the rocket to track its earth-relative position with high accuracy. Much higher accuracy than using GPS much cheaper than using GNSS or IMU combinations and at a refresh rate of 90 Hz. We estimate that depth (Vehicle altitude) can be calculated to sub-centimeter accuracy and horizontal translation can be tracked with < 5-centimeter accuracy.